
이번에 ICCV 2019 에서 발표된 Gaussian YOLOv3 이다.
이 논문은 자율주행 환경을 기반으로 연구되었으며, 자율 주행 차량에서 객체 탐지 알고리즘의 사용이 점차 중요해지고 있으므로 안전한 자율주행을 위해서는 "높은 정확도"와 "빠른 추론 속도"의 객체 탐지가 필수적이라고 한다. 또한 자율 주행중에 False Localization으로 인한 오탐(FP, False Positive)은 치명적인 사고로 이어질 수 있다. 따라서 Mis-localization 에 대처할 수 있는 객체 검출 알고리즘이 필요하다고 한다.
본 논문에서는 Gaussian Modeling 방법을 이용하여 one-stage 검출기로 대표적인 YOLOv3 의 경계 상자(Bounding Box)를 모델링하고 손실 함수(Loss Function)을 재설계하여 실시간 동작이 가능하도록 하였다.
또한 경계 상자의 신뢰성을 나타내는 Localization Uncertainty 을 예측하는 방법을 제안한다. 검출 과정 동안 예측된 Localization Uncertainty 를 사용함으로써 FP 를 상당 감소 시키고, True Positive(TP)를 증가시켜 정확도를 향상 시킬 수 있다.
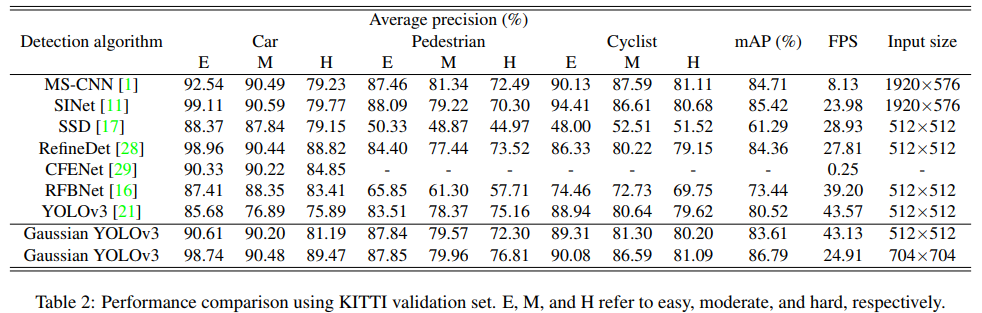
기존 YOLOv3 에 비하여 Gaussian YOLOv3 알고리즘은 KITTI 및 BDD 데이터 셋에서 mAP 를 각 3.09 및 3.5 만큼 향상시켰다. 그럼에도 불구하고 제안된 알고리즘은 초당 42 프레임 보다 빠른 속도로 실시간 검출이 가능하며, 이전 접근 방식보다 정확도가 높다.
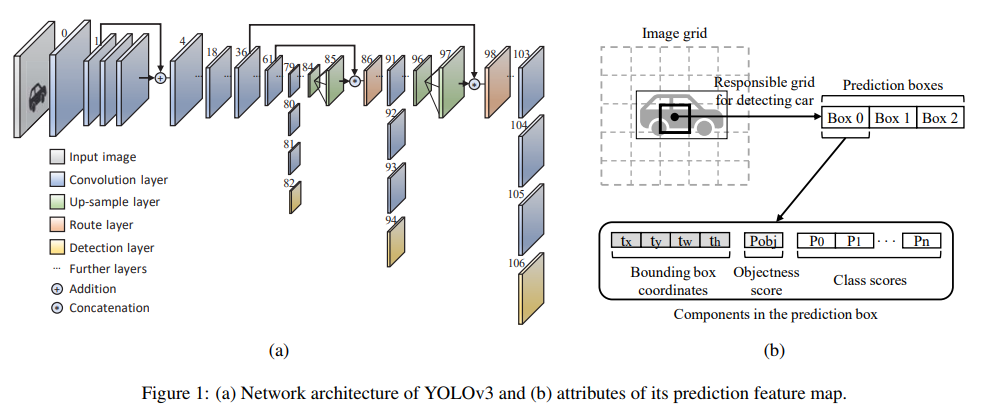
위 그림 1b에서 YOLOv3 의 예측된 특징 맵은 그리드 당 3개의 예측 박스를 가지며, 각각의 예측 박스는 tx, ty, tw, th 의 Bounding box coordinates 로 나타나고, 객관성 점수? 신뢰 점수를 나타내는 Objectness Score, 그리고 클래스 점수 Class Scores 를 뿜게 된다. 그 다음 이 두 값의 곱을 기반으로 객체를 감지한다. Objectness 및 Class 정보와는 달리 예측 박스 좌표들은 점수 대신 좌표 값을 뿜게 되므로 bbox 의 신뢰도를 알 수 없다는 한계를 가진다.
또한 Objectness 는 bbox 의 신뢰성을 잘 반영하지 않는다. 따라서 bbox 가 얼마나 확실한지, 확실하지 않은지 알 수 없다. 그래서 이 논문에서는 bbox의 불확실성은 bbox 점수로서 작용하며, 따라서 bbox가 얼마나 불확실한지를 나타내는 지표로서 사용될 수 있다.
YOLOv3 에서 bbox Regression은 bbox 중심정보 (tx, ty) 및 bbox 크기 정보(tw, th)를 추출하는 것이다. 객체의 bbox에 대한 GT가 하나뿐이라서 Localization Uncertainty을 예측하기 위해 복잡한 모델링이 필요하지 않다. 즉, bbox 의 불확실성은 tx, ty, tw, th 에 단일 가우시안 모델을 사용하여 모델링 할 수 있다. 주어진 테스트 입력 x에 대한 출력 y의 단일 가우시안 모델은 가우시안 파라미터의 출력으로 구성된다. Loss Function 을 재설계한 내용은 논문을 참고하길 바란다...
Github : https://github.com/jwchoi384/Gaussian_YOLOv3
jwchoi384/Gaussian_YOLOv3
Gaussian YOLOv3: An Accurate and Fast Object Detector Using Localization Uncertainty for Autonomous Driving (ICCV, 2019) - jwchoi384/Gaussian_YOLOv3
github.com
Paper : https://arxiv.org/pdf/1904.04620.pdf
“Tutorials of Object Detection using Deep Learning [9] Gaussian YOLOv3. An Accurate and Fast Object Detector Using Localization
ICCV 2019에 accept된 “Gaussian YOLOv3. An Accurate and Fast Object Detector Using Localization Uncertainty for Autonomous Driving” 논문에 대한 리뷰를 수행하였습니다.
hoya012.github.io
BDD Dataset (자율주행 환경 데이터세트) : https://bdd-data.berkeley.edu/
Berkeley DeepDrive
Whitepaper on the dataset is on arXiv! Please download at User portal!
bdd-data.berkeley.edu
'AI Research Topic > Object Understanding' 카테고리의 다른 글
| [Object Detection] darknet 으로 Gaussian YOLOv3 학습하기 (linux) (0) | 2020.01.29 |
|---|---|
| [Paper Review] M2Det : A Single-Shot Object Detector based on Multi-Level Feature Pyramid Network (7) | 2020.01.09 |
| [Object Tracking] SiamMask (0) | 2019.12.27 |
| [Paper Review] YOLACT : Real-time Instance Segmentation (4) | 2019.11.16 |
| [Object Detection] darknet custom 학습하기 (83) | 2019.10.16 |