[Stereo Vision] kinect 설치하기 (Visual Studio 2015, Windows 10, 64 bit, usb 3.0)
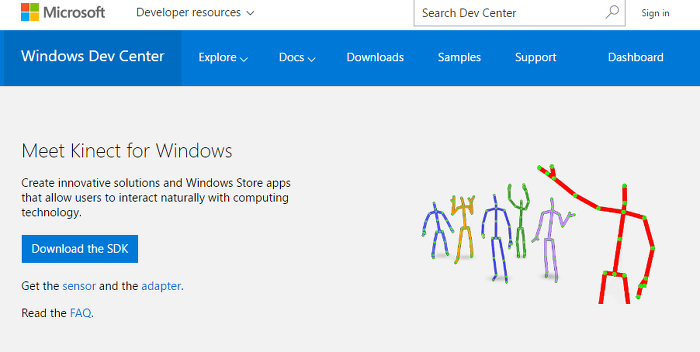
[Kinect] kinect 설치하기 (Windows 10, 64 bit, usb 3.0) 환경은 Windows 10, 64bit, usb 3.0, Visual Studio 2015 이다. usb 3.0 버전은 키넥트 SDK 프로그램 다운로드가 안된다고 하여, 키넥트 SDK 1.8 버전을 다운받았다. 3.0 버전이 아니거나 최신버전 다운을 받고싶다면 아래 사이트에서 SDK를 다운하면 된다. http://www.kinectforwindows.com/ 2.0 버전이거나 낮은 버전을 다운 받고 싶다면 아래 사이트에서 적절한 SDK를 다운하면 된다. 나는 v1.8 을 다운받았다. https://www.microsoft.com/en-us/search/result.aspx?q=kinect+for+windows+sd..
2017.01.19